CLOSE
Python virtualenvironments virtualenv testautomation testframeworks robotframework As was announced at the end of the previous article, we will now proceed and create some additional environments.
We can create as many environments as are required or desired. Those environments may be based on the same and/or different Python versions. For instance, let’s create:
This time, in the course of creating an environment, we will also install one or more third-party packages with it.
That will effectively create ecosystems for our environments and, thus, for the projects that we subsequently will associate with (that is, bind to) those environments.
So, in this post we will look at the following:
We will base our second environment on the same Python version that we used for our first environment. As long as we provide different environment names, we can base multiple environments on the same Python system installation.
This time we will also supply the ‘-i’ option to the mkvirtualenv command. With this switch we tell virtualenvwrapper-win to also install a package into the created environment. We can even repeatedly apply the -i switch, so as to install multiple packages. Let’s try that out by installing Robot Framework and RIDE (i.e. the Robot Framework IDE) with the command:
mkvirtualenv -p 3.7 -i robotframework -i robotframework-ride robot-framework_322-py_37
This command will create a virtual environment and subsequently populate that environment with the latest, stable versions of Robot Framework and RIDE (plus dependencies).
Like so:
(robot-framework-py_37) C:\Users\Michael Hallik>mkvirtualenv -p 3.7 -i robotframework -i robotframework-ride robot-framework_322-py_37
created virtual environment CPython3.7.9.final.0-64 in 534ms
creator CPython3Windows(dest=C:\Python-virtual-environments\robot-framework_322-py_37, clear=False, no_vcs_ignore=False, global=False)
seeder FromAppData(download=False, pip=bundle, setuptools=bundle, wheel=bundle, via=copy, app_data_dir=C:\Users\Michael Hallik\AppData\Local\pypa\virtualenv)
added seed packages: pip==20.3.3, setuptools==51.3.3, wheel==0.36.2
activators BashActivator,BatchActivator,FishActivator,PowerShellActivator,PythonActivator,XonshActivator
Collecting robotframework
Installing collected packages: robotframework
Successfully installed robotframework-3.2.2
Collecting robotframework-ride
Collecting wxPython=4.0.7.post2
...
Installing collected packages: six, pillow, numpy, wxPython, Pywin32, PyPubSub, Pygments, robotframework-ride
Successfully installed PyPubSub-4.0.3 Pygments-2.7.4 Pywin32-300 numpy-1.19.5 pillow-8.1.0 robotframework-ride-1.7.4.2 six-1.15.0 wxPython-4.0.7.post2
(robot-framework_322-py_37) C:\Users\Michael Hallik>
Note that, apparently, it doesn’t matter whether you had an active environment or not. If you issue the mkvirtualenv command while an existing environment is active, then that environment will simply be deactivated and the newly created environment will be activated after it’s creation.
Now, let’s take a quick look at some components of the newly created environment, just like we did in the previous article:
The Python version:
(robot-framework_322-py_37) C:\Users\Michael Hallik>python -V
Python 3.7.9
Since we installed RF, we can retrieve it’s version too:
(robot-framework_322-py_37) C:\Users\Michael Hallik>robot --version
Robot Framework 3.2.2 (Python 3.7.9 on win32)
And if we activate the Python interpreter in our new context:
(robot-framework_322-py_37) C:\Users\Michael Hallik>python
Python 3.7.9 (tags/v3.7.9:13c94747c7, Aug 17 2020, 18:58:18) [MSC v.1900 64 bit (AMD64)] on win32
Let’s look at the location of the Python interpreter:
>>> import sys
>>> sys.executable
'C:\\Python-virtual-environments\\robot-framework_322-py_37\\Scripts\\python.exe'
And the location where site-packages will get installed:
>>> import site
>>> site.getsitepackages()
['C:\\Python-virtual-environments\\robot-framework_322-py_37', 'C:\\Python-virtual-environments\\robot-framework_322-py_37\\lib\\site-packages']
Finally, let’s retrieve the location of our Robot Framework installation:
>>> import robot
>>> print(robot.__path__)
['C:\\Python-virtual-environments\\robot-framework_322-py_37\\lib\\site-packages\\robot']
We can also now run RIDE in the context of our new environment:
(robot-framework_322-py_37) C:\Users\Michael Hallik>ride.py
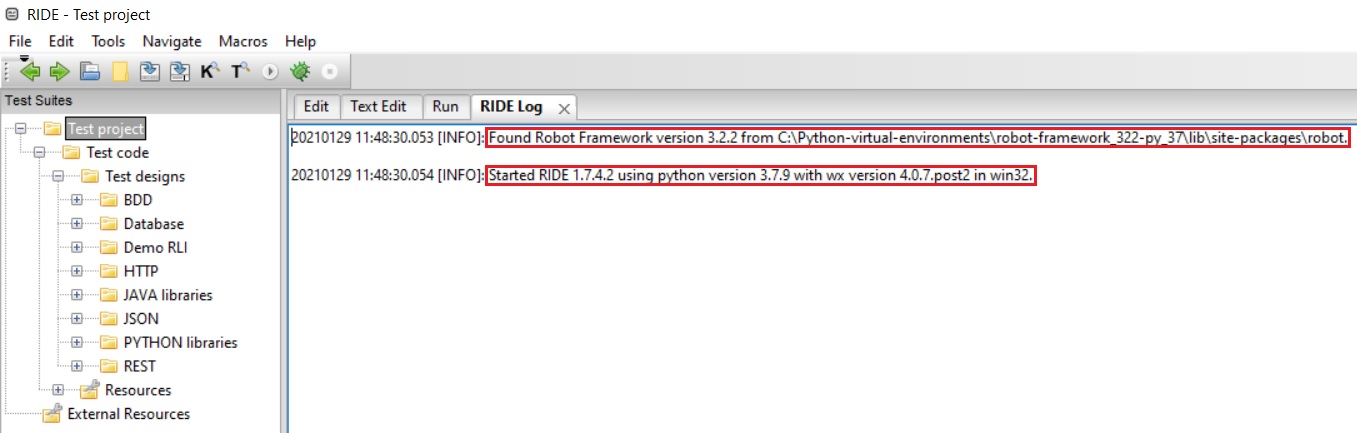
As you can see, we now have an isolated and fully functioning and active second environment based on the same Python system installation as before. Through the -i switch we have populated that environment with a few third-party libraries.
However, a (minor) disadvantage of using the -i switch to install packages, is that we cannot specify a package version. E.g. when we would like to install an older version of e.g. Robot Framework, we can’t do this through the -i switch. Moreover, the more packages we want to install, the longer our command will become, due to a multitude of ‘-i [package-name]’ clauses.
Luckily there is a less cumbersome approach for installing packages together with a new environment. So let’s take a look at that.
Again, we will create an environment and install some third-party packages with it.
But this time we will use a very nice pip feature. That is, we will use a requirements file, which is simply a plain text file that we can use to specify the packages that we want to install into our new environment.
This is the requirements file that we’ll use (click the image and you’ll get the text):
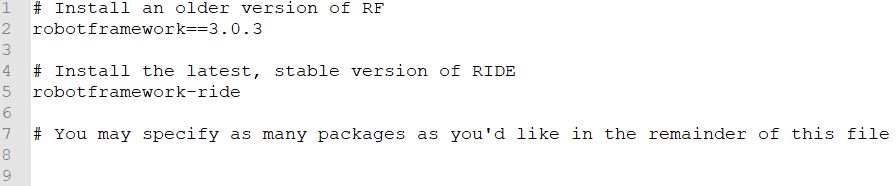
As you can see, we can (optionally) specify a version for a package. This overcomes the limitation of the -i switch. Additionally, installing a multitude of packages becomes more efficient and manageable than when having to specify everything in our command.
Using the -r switch we can direct virtualenvwrapper-win (and thus pip) to our requirements file:
mkvirtualenv -p 3.8 -r C:\Tmp\requirements.txt robot-framework_303-py_38
Let’s give it a try:
(robot-framework_322-py_37) C:\Users\Michael Hallik>mkvirtualenv -p 3.8 -r C:\Tmp\requirements.txt robot-framework_303-py_38
created virtual environment CPython3.8.7.final.0-64 in 543ms
creator CPython3Windows(dest=C:\Python-virtual-environments\robot-framework_303-py_38, clear=False, no_vcs_ignore=False, global=False)
seeder FromAppData(download=False, pip=bundle, setuptools=bundle, wheel=bundle, via=copy, app_data_dir=C:\Users\Michael Hallik\AppData\Local\pypa\virtualenv)
added seed packages: pip==20.3.3, setuptools==51.3.3, wheel==0.36.2
activators BashActivator,BatchActivator,FishActivator,PowerShellActivator,PythonActivator,XonshActivator
Collecting robotframework==3.0.3
Collecting robotframework-ride
Collecting wxPython=4.0.7.post2
...
Installing collected packages: six, pillow, numpy, wxPython, Pywin32, PyPubSub, Pygments, robotframework-ride, robotframework
Successfully installed PyPubSub-4.0.3 Pygments-2.7.4 Pywin32-300 numpy-1.19.5 pillow-8.1.0 robotframework-3.0.3 robotframework-ride-1.7.4.2 six-1.15.0 wxPython-4.0.7.post2
A quick look at our environment shows that we have a completely new context to execute our Python commands/scripts in:
(robot-framework_303-py_38) C:\Users\Michael Hallik>python -V
Python 3.8.7
(robot-framework_303-py_38) C:\Users\Michael Hallik>robot --version
Robot Framework 3.0.3 (Python 3.8.7 on win32)
(robot-framework_303-py_38) C:\Users\Michael Hallik>python
Python 3.8.7 (tags/v3.8.7:6503f05, Dec 21 2020, 17:59:51) [MSC v.1928 64 bit (AMD64)] on win32
>>> import sys
>>> sys.executable
'C:\\Python-virtual-environments\\robot-framework_303-py_38\\Scripts\\python.exe'
>>> import site
>>> site.getsitepackages()
['C:\\Python-virtual-environments\\robot-framework_303-py_38', 'C:\\Python-virtual-environments\\robot-framework_303-py_38\\lib\\site-packages']
>>> import robot
>>> print(robot.__path__)
['C:\\Python-virtual-environments\\robot-framework_303-py_38\\lib\\site-packages\\robot']
Finally, let’s create a fourth environment. This time around, we’ll install only one package, the latest, stable version of Robot Framework.
mkvirtualenv -P 3.9 -i robot-frameworkrobot-framework-py_39
We have now four environments at our disposal:
Of course we can also populate existing environments with third-party packages. Naturally, this is regardless whether we had or had not installed packages when we had created those environments with mkvirtualenv.
For instance, let’s populate our first environment with a bunch of Robot Framework test libraries.
If the environment is not currently active, then first issue the workon command and subsequently run pip. For instance:
C:\Users\Michael Hallik>workon robot-framework-py_37
(robot-framework-py_37) C:\Users\Michael Hallik>pip install robotframework
Collecting robotframework
Using cached robotframework-3.2.2-py2.py3-none-any.whl (623 kB)
Installing collected packages: robotframework
Successfully installed robotframework-3.2.2
(robot-framework-py_37) C:\Users\Michael Hallik>
We can also use a requirements file, like this one (click the image and you’ll get the text):
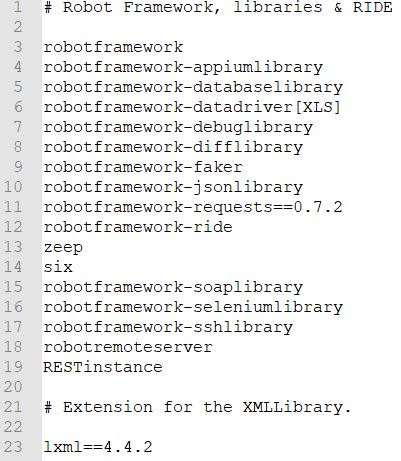
We could use this file to further populate our first environment (note that the ‘robotframework’ line of the requirements file will already be satisfied and thus skipped):
(robot-framework-py_37) C:\Users\Michael Hallik>pip install -r C:\Tmp\requirements.txt
Requirement already satisfied: robotframework in c:\python-virtual-environments\robot-framework-py_37\lib\site-packages (from -r C:\Tmp\requirements.txt (line 8)) (3.2.2)
Collecting lxml==4.4.2
Collecting robotframework-requests==0.7.2
Collecting six
Collecting RESTinstance
Collecting robotframework-appiumlibrary
Collecting Appium-Python-Client>=0.28
Collecting jsonpointer-2.0-py2.py3-none-any.whl (7.6 kB)
...
Installing collected packages: pycparser, zipp, typing-extensions, six, cffi, urllib3, pynacl, ply, importlib-metadata, idna, filelock, distlib, decorator, cryptography, ...
...
(robot-framework-py_37) C:\Users\Michael Hallik>
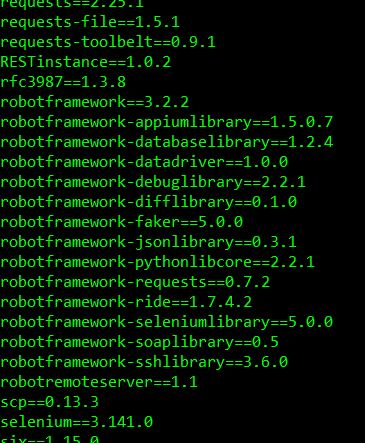
Issuing the command:
pip freeze
will show us the newly installed packages:
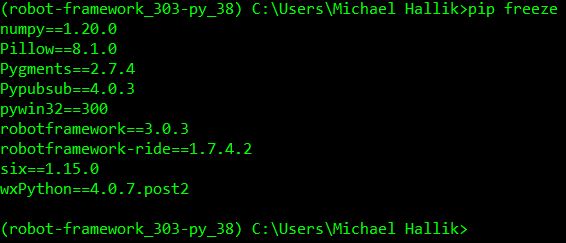
Doing a:
pip freeze
for our third environment will show us this:
The same will go for our fourth environment.
So, as expected, the packages installed per requirements files where installed for the second environment exclusively.
We have created four virtual environments and populated some of them. Some during their creation and some afterwards. We can install packages separately or in a ‘batch’, using a requirements file.
As you can see, we are completely free to install anything into any environment. This offers maximum flexibility and offers a lot of possibilities when it comes to creating different tool stacks.
Let’s look at some of these possibilities in the next post.
Comments
Please join the discussion: place a comment on this page.
The comment will be immediately visible in this comment section.
Please note a Github account is required to comment.